百度自动驾驶视觉大模型加持 极越纯视觉智驾再升级
3月25日,行业首个汽车AI技术大会,也是极越首个AI DAY技术发布会在北京举办,极越CEO夏一平发布OTA V1.4.0新版软件,百度最前沿的AI原生科技将持续支持极越汽车机器人进化。2024年,在百度地图LD(车道级导航)的支持下,极越PPA智驾即将实现全国都能开。另外,百度Apollo自动驾驶视觉大模型VTA也首次发布,这也将进一步提升极越纯视觉的识别感知能力,让智能驾驶更聪明。

背靠百度Apollo L4级算法 极越纯视觉站稳第一梯队
目前来看,纯视觉智驾方案正逐步开始成为主流,特斯拉便是纯视觉技术的开创者。在国内,极越01的高阶智驾采取BEV+OCC+Transformer(即B.O.T)的“纯视觉”技术方案,极越也是国内首个采用纯视觉智驾方案的品牌,真正做到国内唯一、全球唯二。
但和特斯拉相比,极越的纯视觉智驾方案不仅更适合中国国情,而且整合了百度Apollo、百度地图等多项行业尖端科技,快速入围全国高阶智驾第一梯队,并跻身全球纯视觉智驾头部。这也是为什么极越纯视觉出道即巅峰的重要因素。
国际知名调研机构Guidehouse Insights最新公布的全球自动驾驶技术公司分析报告显示,在全球L4级自动驾驶排名中,百度已连续三年上榜,并与Waymo、Mobileye等领先的自动驾驶技术公司一起位列全球第一梯队。在核心专利方面,百度专利申请量居榜首达3477件,丰田、博世、本田、现代等企业位居其后。

在全球做L4的车企都凤毛麟角的环境下,百度在L4自动驾驶早已开始落地应用,百度自动驾驶出行服务平台萝卜快跑,已累计提供了超过400万次服务,L4级技术的安全行驶里程已经高达9000万公里。在全国各大主要城市,你可以轻松打到一辆L4级无人驾驶的百度出租车,体验真正的纯无人驾驶。
极越01的纯视觉高阶智能驾驶底层算法是Apollo的L4级技术赋能的,当然不是直接“复制粘贴”,而是说有L4级算法的技术积累,这自然比市面上其他品牌的L2级辅助驾驶更加领先。
作为极越纯视觉智驾方案的重要组成部分,OCC占用网络在最新的V1.4.0版本中再次升级,感知能力大幅提升。在拥有比肩激光雷达的厘米级3D模型刻画的基础上,OCC对障碍物的识别种类再度增加,不仅包括施工牌、围栏、路障、防撞桶等单个静态障碍物,而且对道路临时施工的围栏、靠边停靠的故障车辆、临时堆放的大垃圾桶等障碍物也能精准感知。

点到点领航辅助PPA也大幅升级,可以应对更复杂的行车场景。例如,在路况复杂路口,前车转弯太慢、电瓶车贴靠太近,PPA都能主动绕行提升效率。在突遇道路施工围栏、路边故障车辆、临时堆放杂物等情况,PPA可以灵活绕开或及时刹停。针对很多用户因为长实线或大车挡道而错过高速匝道出口的问题,PPA也能为之合理规划路线,找准变道时机,让每一位极越用户少走冤枉路。
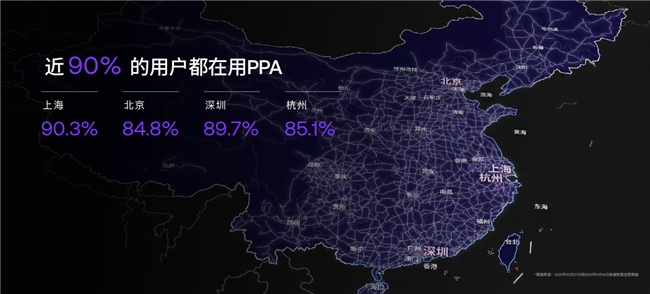
目前,近90%的用户都在使用极越PPA智驾,累计行驶里程已超过180万公里,相当于绕地球45圈。城市PPA又新开一城——广州,这也是继北京、上海、杭州、深圳之后的第5个城市。对于较为特殊的北京城市路段,PPA也进一步完善,可全面覆盖五环内城区的主要道路。
2024年PPA全国都能开 智驾有图更安全
正是基于百度强大的AI技术支持,推动极越纯视觉持续进化。在此次AI DAY中,来自百度的自动驾驶、LD地图等最新AI原生科技重磅亮相,2024年极越PPA智驾“全国都能开、路路好体验”的目标指日可待。
地图的选择也对智驾能力起到关键作用。当前,“有图”、“无图”已经成为智能驾驶领域的热议话题。有图指的是使用高精地图,成本高,落地慢;无图指的是使用最基础的导航地图,精度低,体验差。

而百度地图LD地图(LD即车道级导航)是自动驾驶原生地图,由自动驾驶视觉感知大模型而生成,彻底重构传统的地图生产模式,实现端到端地图生成新范式,突破了车道级地图规模化的瓶颈。LD为自动驾驶而生,对传统高精地图的要素、精度等最小化的要求,保留最必需的要素和精度;同时,增加了经验图层、安全图层、实时图层等传统高精地图不具备的要素,让自动驾驶开得更安全。
LD地图具备“全国城市都能开”、“手机/舱驾都能用”、“智驾有图才安全”三个特点,真正的全国360城全覆盖,全球唯一将自动驾驶原生地图应用在手机和汽车上,让智驾像人一样开,比人更安全。
值得一提的是,这项黑科技很快就会应用到极越01身上,全面提升极越纯视觉智驾的能力,而且从此以后,只要百度地图导航能到的地方,极越01的PPA智驾功能就能流畅使用。
另外,基于大模型,百度打造了行业第一的智驾数据生产线、LLM赋能的自动驾驶数据索引,与此同时,通过生成式AI技术,百度也具备高效处理长尾数据的能力,这些都是推动端到端自动驾驶技术发展的重要数据引擎。
百度Apollo自动驾驶视觉大模型VTA也首次发布,该技术模型大幅升级了动静态检测、时序跟踪、实时建图、场景理解等能力,将再度提升极越纯视觉高阶智驾能力上限,让极越的智能驾驶可以为用户带来更极致的AI出行体验。

由此可以预见,随着极越和百度等科技企业不断创新,将让更极智、更高阶的智能驾驶技术与人们的日常生活更加紧密地结合起来,为人们带来更加便捷、高效和舒适的汽车机器人出行体验。
-
2024年极越PPA全国都能开 有百度地图就能用
03-27 15:34
-
近90%用户都在用极越PPA 累计行驶里程超180万公里
03-27 15:34
-
百度自动驾驶视觉大模型加持 极越纯视觉智驾再升级
03-27 15:34
-
皖事通启动鸿蒙原生应用开发,安徽省政务迈入全场景时代
03-27 14:09
-
解决用水之忧 老板净热一体机S系列AWE2024隆重亮相
03-27 11:21
-
中国小伙在尼日利亚当酋长
03-27 09:55
-
新时代消费降级下的新火锅业态:川渝火锅之都杀出的黑马,本地人爱吃占比70%
03-27 09:17
-
风气扬帆|第九届上海空气新风展报名通道开启,邀您共赴空净行业盛会!
03-26 17:23
-
倒计时2天 | 全栈液冷,揭秘全球领先智算密码
03-26 17:15
-
Hush Puppies暇步士(鞋履)与DoggyGo联袂举办“宠友欢聚日”活动,引领宠物营销新潮流
03-26 15:23
